


← Anmeldung Kindergarten Vorlage Aquabeads Motiv Vorlagen Zum Ausdrucken 3d Drucker G Code Vorlagen →
Github is where the world builds software.
Kalman filter beispiel. This function determines the optimal steady state filter gain m based on the process noise covariance q and the sensor noise covariance r. Millions of developers and companies build ship and maintain their software on github the largest and most advanced development platform in the world. Januar 2015 um 20 52 uhr.
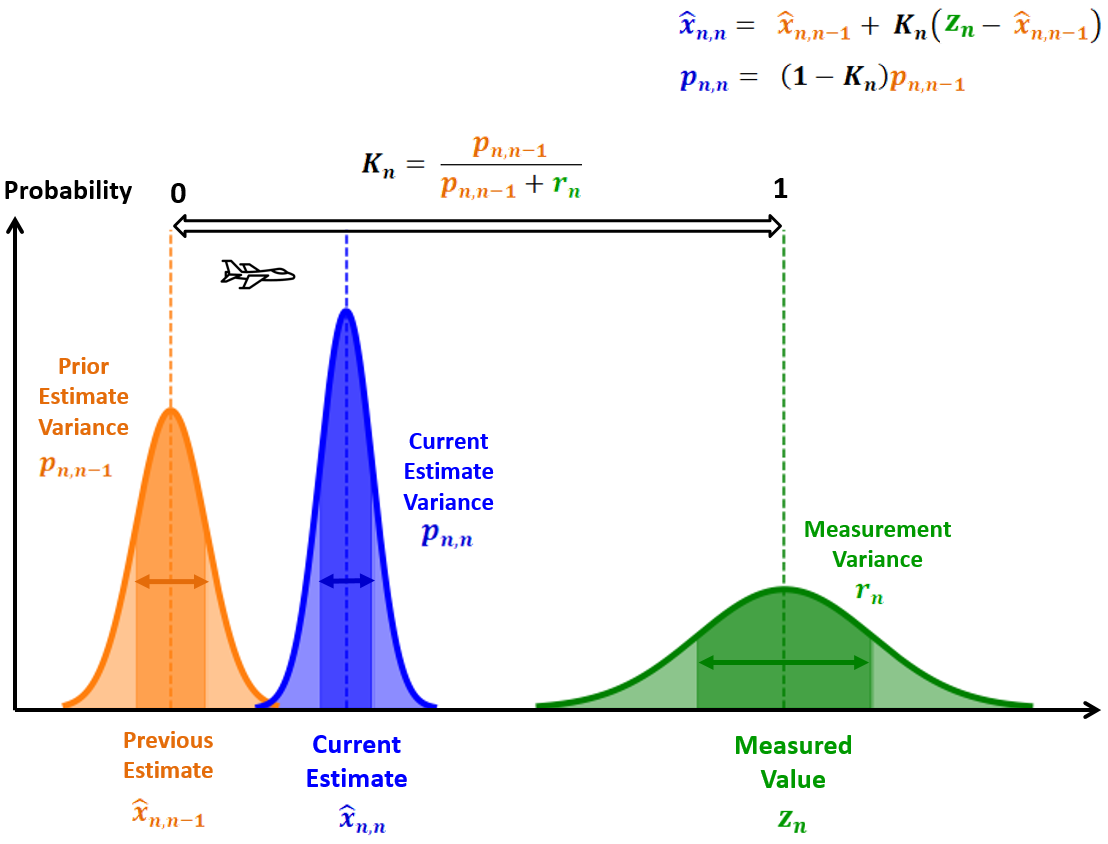
The kalman filter keeps track of the estimated state of the system and the variance or uncertainty of the estimate. Sie bilden positions und geschwindigkeitssignale ab indem sie messwerte von gps und inertialen messeinheiten zusammenführen. But i really can t find a simple way or an easy code in matlab to apply it in my project.
Für mein verständnis ist das eine umgekehrte reihenfolge. The papers establishing the mathematical foundations of kalman type filters were published between 1959 and 1961. Unfortunately in engineering most systems are nonlinear so attempts were made to apply this filtering.
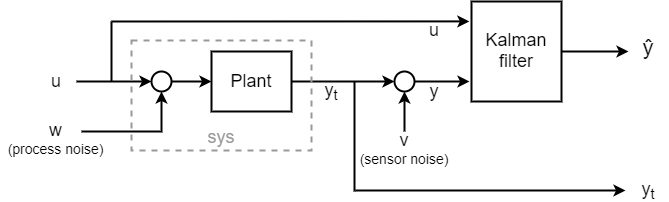
Is the corresponding uncertainty. In the steady state kalman filter the matrices k k and p k are constant so they can be hard coded as constants and the only kalman filter equation that needs to be implemented in real time is the. Design a kalman filter to estimate the output y based on the noisy measurements yv n c x n v n steady state kalman filter design.
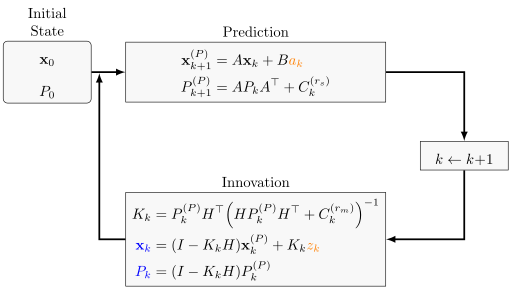
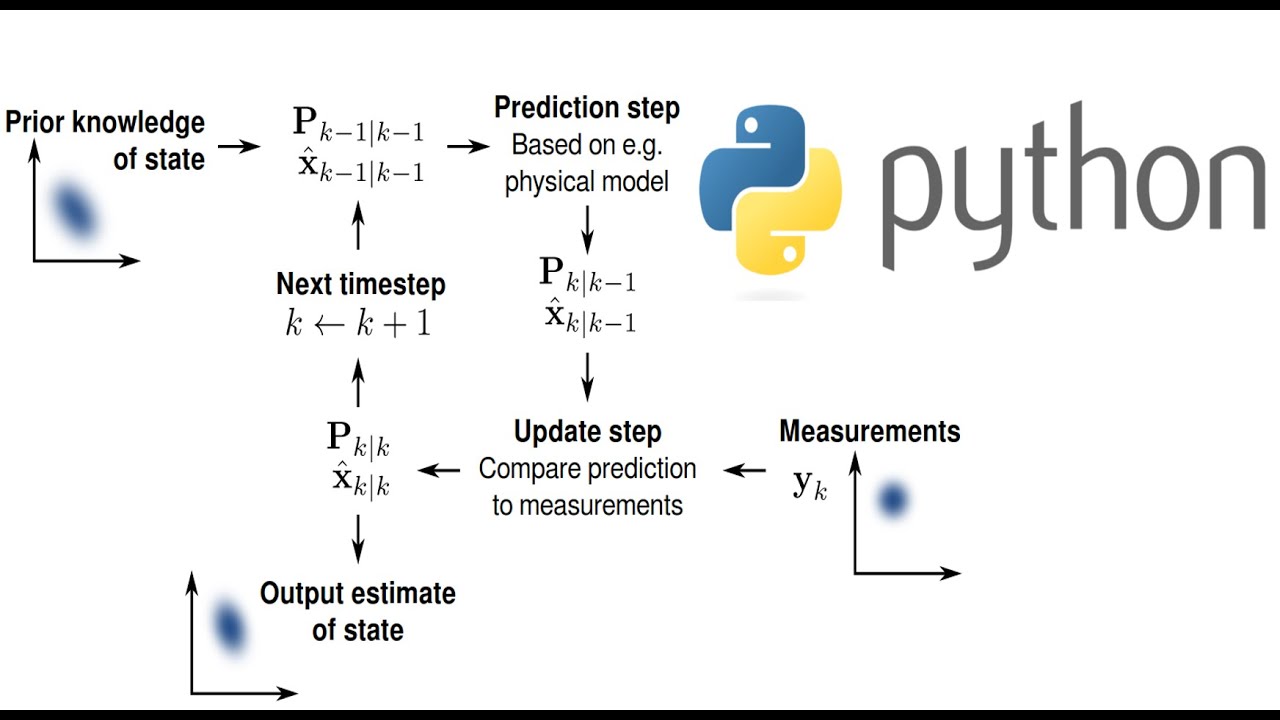
The estimate is updated using a state transition model and measurements. Denotes the estimate of the system s state at time step k before the k th measurement y k has been taken into account. Kalman filter explained with python code.
Cf batch processing where all data must be present. Im nächsten beispiel multidimensionales kalman filter wird 1. It is recursive so that new measurements can be processed as they arrive.
Guidance navigation control. You can use the function kalman to design a steady state kalman filter. A kalman filter is an optimal estimator ie infers parameters of interest from indirect inaccurate and uncertain observations.
Optimal in what sense. What is a kalman filter and what can it do. Danke für die erklärung im voraus gruß oliver.
The kalman filter is the optimal linear estimator for linear system models with additive independent white noise in both the transition and the measurement systems.
Source : pinterest.com